人工智能研究从这里开始。
官方ROS平台。

TurtleBot3 Waffle Pi 是增强版,具有更高的有效负载能力和额外的传感器。紧凑、模块化、可编程的新一代移动机器人。学习 ROS 操作系统并为教学、研究和新开发创建有趣的应用程序。
显着特点:

| | 流行的 ROS 平台。 TurtleBot 是世界上受欢迎的用于教学和研究的开源机器人。 | | 
| | 可接受的价格。 TurtleBot 是方便的学习、开发和原型设计平台。 |

| | 紧凑。 机器人体积小是其显着特点。 | | 
| | 改进的机会。 各种传感器、引擎、单板计算机和模块化机箱的存在将使您能够实现任何想法。 |

| | 模块化伺服驱动器。 伺服驱动器易于安装、更换和重新配置。 | | 
| | 开源软件。 用户可以访问各种开源软件选项并能够更改源代码。 |

| | 开放硬件。 组件(电路、印刷电路板)属于公共领域。 | | 
| | 强大的传感器。 该机器人配备了Raspberry Pi相机、360°激光测距仪(LiDAR)、9
轴万向节单元(IMU)和高精度编码器。 |
主要成分:

- 用于测绘、定位 (SLAM) 和导航的 360° 激光测距仪 (LiDAR)
- 可变模块化结构
- 单板计算机(Raspberry Pi 3)
- OpenCR 控制器(32 位 ARM Cortex M7)
- 树莓派相机
| | - 两个 Dynamixel 伺服电机用于控制车轮
- 轮胎和履带用链轮
- 锂聚合物 (Li-Po) 电池 11.1V 1800 mAh
- 蓝牙模块用于远程控制
|
规格:
范围
| | 华夫饼派
| | 汉堡包
|
最大前进速度 | | 0.26米/秒 | | 0.22米/秒 |
最大角速度 | | 1.82 弧度/秒
(104.27 度/秒) | | 2.84 弧度/秒
(162.72 度/秒) |
最大有效负载 | | 30公斤力 | | 15公斤力 |
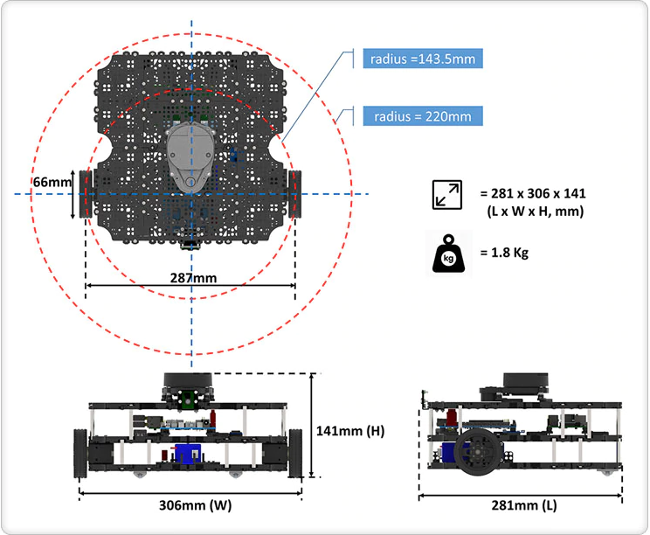
尺寸(长 x 宽 x 高) | | 281×306×141毫米 | | 138 x 178 x 192 毫米 |
组装重量 | | 1.8公斤 | | 1公斤 |
工作时间 | | 约2小时 | | 约 2 小时 30 分钟 |
充电时间 | | 约 2 小时 30 分钟 | | 约 2 小时 30 分钟 |
动力伺服电机 | | XM430-W210-T | | XL430-W250-T |
单板计算机 | | 树莓派3 | | 树莓派3 |
内置控制器 | | OpenCR(32 位 ARM Cortex M7) | | OpenCR(32 位 ARM Cortex M7) |
| 传感器 | | - Raspberry Pi 相机
- 360° 激光测距仪 (LiDAR)
- 3 轴陀螺仪
- 3 轴加速度计
- 3 轴磁力计 | | - 360° 激光测距仪 (LiDAR)
- 3 轴陀螺仪
- 3 轴加速度计
- 3 轴磁力计 |
树莓派 B 型 | 树莓派 B 型 | 360°激光雷达 |
 |  |  |
- CPU:四核 1.2 GHz
- 1 GB 内存
- 无线网络模块
- 外部端口
| - 尺寸:22 x 24 x 9 毫米
- 分辨率:8兆像素
- 视频模式:最高 1080p30
- 传感器:索尼IMX219
| - 测量范围:120 - 3500 毫米
- 扫描角度:360°
- 角度分辨率:1°
|
配件:
